
一、机器人手臂控制器行业标准剖析
GB/T 39004—2020《工业机器人电磁兼容设计规范》
GB/T 37283-2019 服务机器人 电磁兼容 通用标准 抗扰度要求和限值
GB/T 39785-2021 服务机器人 机械安全评估与测试方法
GB/T 40014-2021 双臂工业机器人 性能及其试验方法
GB/T 40013-2021 服务机器人 电气安全要求及测试方法
GBZ 41046-2021 上肢康复训练机器人 要求和试验方法
TGDCKCJH 013-2020 工业机器人伺服系统可靠性通用要求
TGDCKCJH 014-2020 工业机器人伺服系统可靠性仿真试验规范
TGDCKCJH 015-2020 工业机器人伺服系统可靠性强化试验方法
TGQDA 00005-2021 机器人控制器加速试验与可靠性指标验证方法
TSSITS 301-2020 工业应用移动机器人 设计通则
1.1 同样在T/ZXCH 0014- 2023标准中,规定了详细的试验方法和检验规则。通过这些标准的试验方法,可以准确测试机器人手臂控制器的各项性能,判断其是否符合技术要求;检验规则则明确了产品的合格判定准则,从原材料检验到成品检验,每一个环节都有严格的规范,保证进入市场的机器人手臂控制器质量可靠,为用户提供稳定、高效的使用体验
1.2 GB/T 37283-2019《服务机器人 电磁兼容 通用标准 抗扰度要求和限值》
B 级:服务机器人正常工作时,其性能受到一定电磁干扰影响,但仍能满足基本功能要求
|
试验名称 |
中国标准 |
国际标准 |
|
静电放电抗扰度试验 |
GB/T 17626.2 |
IEC61000-4-2 |
|
射频电磁场辐射抗扰度试验 |
GB/T 17626.3 |
IEC61000-4-3 |
|
电快速瞬变脉冲群抗扰度试验 |
GB/T 17626.4 |
IEC61000-4-4 |
|
浪涌(冲击)抗扰度试验 |
GB/T 17626.5 |
IEC61000-4-5 |
|
射频场感应的传导骚扰抗扰度试验 |
GB/T 17626.6 |
IEC61000-4-6 |
|
工频磁场抗扰度试验 |
GB/T 17626.8 |
IEC61000-4-8 |
|
电压暂降、短时中断和电压变化的抗扰度试验 |
GB/T 17626.11 |
IEC61000-4-11 |
国际标准化组织(ISO)标准
ISO 10218-1:2011 :《机器人与机器人装置 工业机器人的安全要求 第 1 部分:机器人》
ISO 10218-2:2011:《机器人与机器人装置 工业机器人的安全要求 第 2 部分:机器人系统与集成》
ISO/TS 15066:2016:《机器人与机器人装置 协作机器人》
美国标准
ANSI/RIA R15.06-2012:《工业机器人和机器人系统 安全要求》
RIA TR R15.606-2016:美国协作机器人安全标准
欧盟标准
EN ISO 10218-1:2011和EN ISO 10218-2:2011
EN 60204-1:《机械安全 机械电气设备 》
德国
VDI 2057 Blatt 2-2002和VDI 2057 Blatt 2-2012:《人体暴露于机械振动 手臂振动》
DIN EN ISO 13849-1:2016:《机械安全 控制系统的安全相关部件
日本机器人协会(JARA),ISO 13482 是关于护理机器人安全性的国际标准
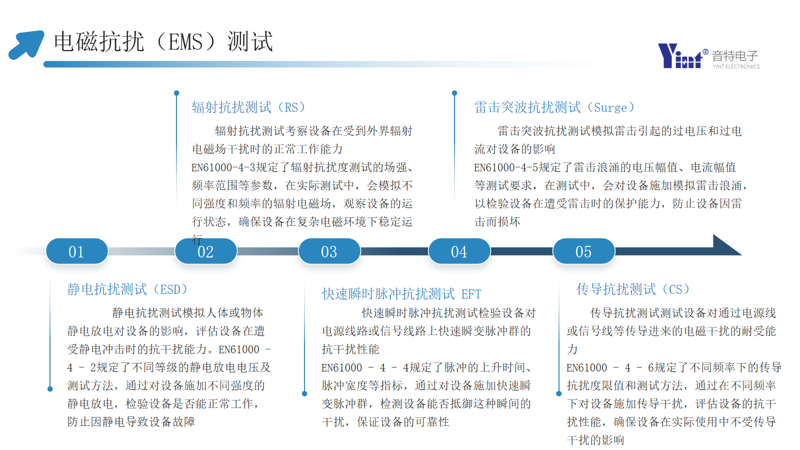
二、机器人手臂控制器EMC电磁兼容
2.1 GB/T 39004—2020《工业机器人电磁兼容设计规范》,该标准于中国机械工业联合会规定了工业机器人的示教器、控制柜、机器人本体、印制电路板(PCB)的电磁兼容(EMC)设计要求 2.2 EMC证实方法: 电磁兼容性测试方法:规定了工业机器人电磁兼容性的测试方法和程序,包括测试环境、测试设备、测试项目和测试步骤等 设计过程记录:要求对工业机器人电磁兼容设计的过程进行记录,包括设计文档、测试报告、整改记录等,以便于追溯和验证设计的有效性
2.3 工业机器人在运行过程中会产生大量电磁干扰,同时自身也对外界电磁干扰敏感。如果电磁兼容性处理不当,不仅会影响机器人系统的稳定性和精确性,导致动作偏差、数据传输错误等问题,还可能干扰周围设备的正常工作
2.4 以汽车制造自动化生产线为例,控制机器人手臂的控制系统对电磁干扰非常敏感,一旦受到干扰,机器人手臂可能会出现动作偏差,影响汽车零部件的安装质量。因此,对机器人手臂控制器进行EMC设计与测试,是确保其在各种电磁环境下可靠运行的关键,对于保障工业生产的顺利进行具有重要意义
2.5 EMC抗干扰设计方法
屏蔽 是常见的抗干扰措施,通过使用金属屏蔽材料将设备或电路包围起来,能够有效阻止外部电磁干扰进入,同时防止内部电磁干扰泄漏出去;例如,在工业电缆中,通常会使用金属屏蔽层来保护电缆内部的信号传输不受外界干扰
接地 可以将设备上的电磁干扰电流引入大地,从而降低设备的电磁干扰水平;在工业自动化系统中,会根据设备特点和电磁环境选择单点接地、多点接地等不同的接地方式
合理布局在工业自动化设备的设计和安装过程中,能减少电磁干扰的产生和传播。比如将强电设备和弱电设备分开布置,避免强电设备对弱电设备产生干扰;合理规划电缆的走向,避免电缆之间的相互干扰
滤波 去除电路中的高频干扰信号,在电源电路中,常使用电源滤波器来抑制电源线上的电磁干扰,保证设备获得稳定、纯净的电源
三、机器人手臂控制器常见问题与行业痛点洞察
技术瓶颈A 机器人手臂控制器的核心部件和关键技术仍存在短缺问题,高性能伺服电机、减速器、控制器等技术壁垒高,突破难度大,限制了机器人整体性能的提升
技术瓶颈B 智能化、感知能力和适应性仍有待提高。在复杂多变的工作环境中,机器人手臂控制器难以快速、准确地感知环境变化并做出相应调整,无法满足日益增长的多样化应用需求
市场困境 目前机器人行业市场竞争激烈,同质化现象严重,许多企业为了争夺市场份额,大打价格战,导致整个行业利润空间被大幅压缩,企业缺乏足够的资金投入研发和创新,不利于行业的健康发展;机器人企业在市场开拓方面面临诸多困难,一方面,对市场需求的了解不够深入,产品与市场实际需求存在一定偏差;另一方面,缺乏有效的营销策略,难以打开新的市场和客户群体,限制了企业的发展规模和速度
四、为机器人手臂控制器赋能
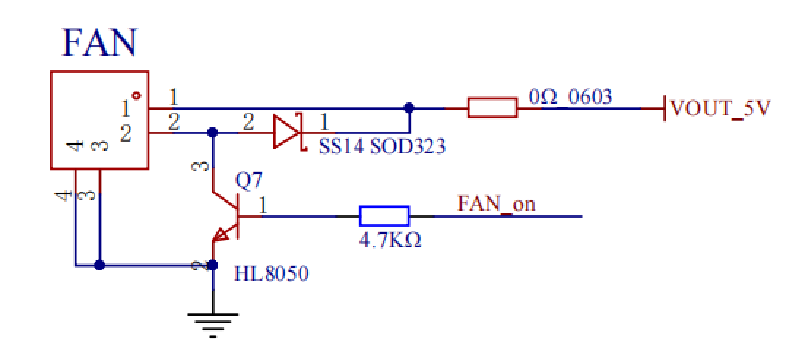
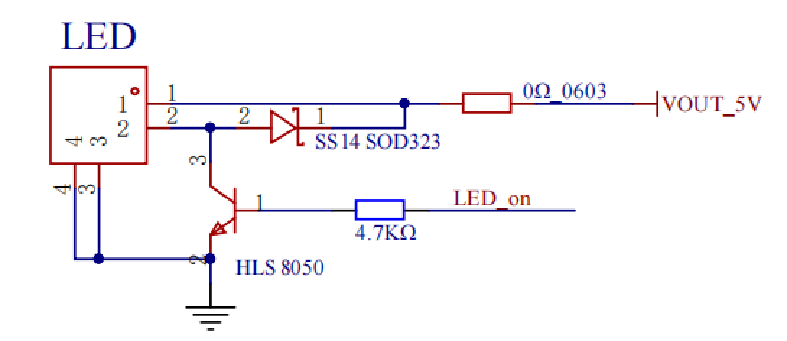
风扇模块解决方案 , 针对机器人手臂控制器的风扇模块,采用高效散热设计理念,选用高性能的风扇组件,确保在机器人手臂控制器运行过程中能够快速、有效地散发热量, 通过优化风扇的转速控制算法,实现根据控制器的温度实时调节风扇转速,既能保证良好的散热效果,又能降低风扇运行产生的噪音和能耗,提高系统的稳定性和可靠性;音特电子能够提供SS14 ,HL8050
在LED显示模块方面,提供高亮度、高对比度的LED显示屏,能够清晰地展示机器人手臂控制器的各种运行状态信息,如工作模式、故障报警等,确保LED显示屏的显示效果稳定,延长显示屏的使用寿命,音特电子能够提供 SS14 、HL8050
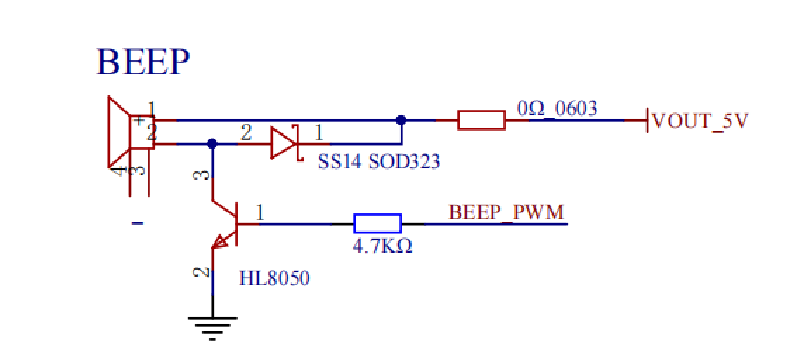
对于BEEP蜂鸣器模块,使其在机器人手臂控制器出现异常情况时,能够及时、准确地发出警报声,引起操作人员的注意,为操作人员提供明确的故障提示,便于及时采取相应的处理措施;音特电子能够提供SS14 ,HL8050
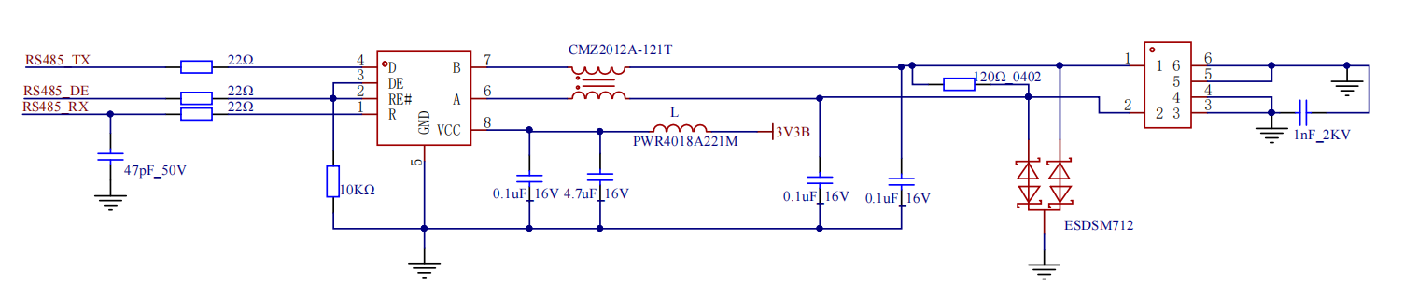
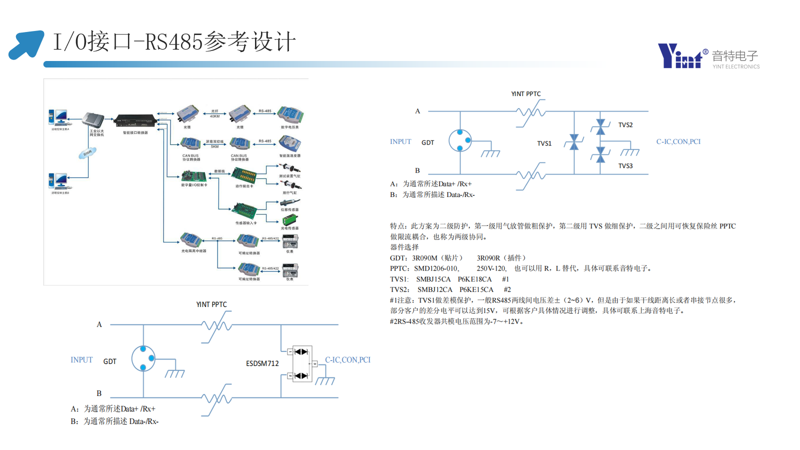
RS485通讯模块具备高抗干扰能力,采用先进的差分信号传输技术,有效减少信号传输过程中的干扰,确保数据传输的准确性和稳定性
CMZ2012-121T 共模电感,提高EMI性能
PWR4018A221M 提高电源的品质
ESDSM712 静电保护,确保安装拔插过程的静电干扰
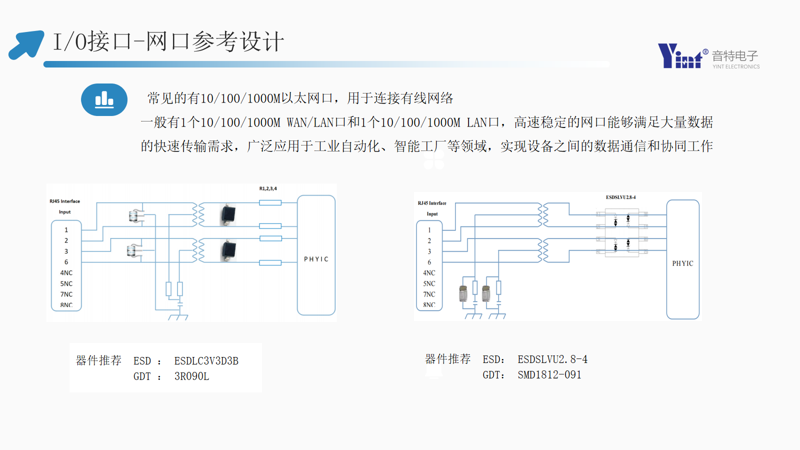
以太网通讯模块提供高速的网络连接,采用先进的网络芯片和优化的网络驱动程序,确保机器人手臂控制器能够快速、稳定地接入以太网,具备网络自适应功能,可自动识别网络环境并调整通信参数,实现与不同网络设备的无缝对接。同时,支持多种网络协议,满足不同应用场景下的数据传输需求很重要
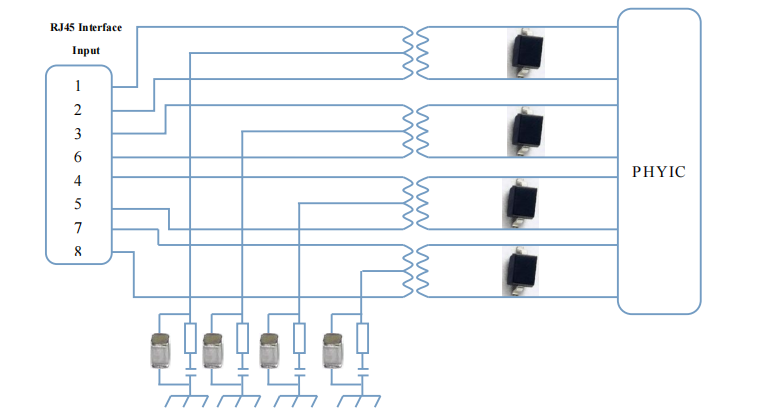
GDT/SMD1812-091
或者 GDT/3R090-8L
区别在于第二级防护,由于千兆网的传输速率更快,对寄生电容值得要求更高,一般推荐 2pF 以下,差分电
压百兆千兆也有不同,故第二级保护使用的器件也和百兆网不同。音特推荐使用电容只有 0.8pF 的
ESDLC3V3D3B,封装为 SOD323,或者使用音特电子专为千兆网络定制的 ESDSLVU2.8-4H,封装为 SOP-8,使用方
法和百兆网上的 ESDSLVU2.8-4 一样
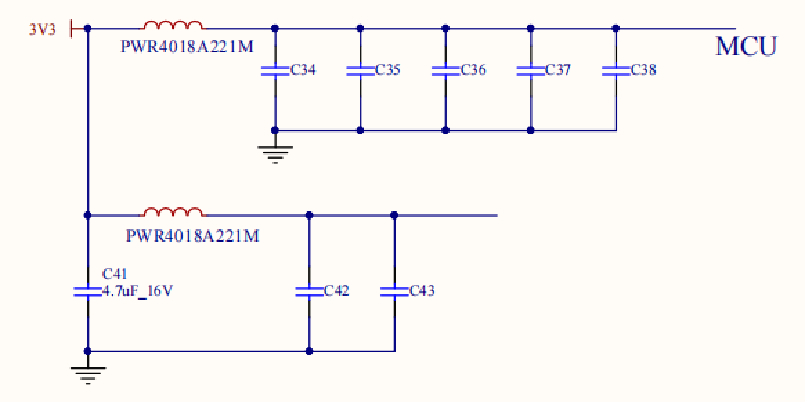
在MCU处理器模块方面,除了选用高性能、低功耗的MCU芯片,具备强大的数据处理能力和丰富的外设资源,能够快速响应各种控制指令,实现对机器人手臂的精确控制,对于MCU的电源供电电源也很关键
音特电子提供 PWR4018A221M 滤波电感
致力成为全球 EMC电磁兼容技术方案及器件供应商 www.yint.com.cn

一 国内及国际行业标准
1.1 工业互联网边缘计算 边缘网关管理接口要求》(YD/T 6119 - 2024)自2025年4月1日实施,它规定了工业互联网边缘网关的北向接口技术要求,包括网元管理接口和虚拟化资源管理接口要求,适用于边缘网关节点与边缘云的交互和通信,为二者之间的顺畅沟通奠定了基础
1.2 《工业互联网边缘计算 边缘节点模型与要求 边缘控制器》规范了边缘计算节点中的边缘控制器的模型与要求,确保边缘控制器在整个系统中稳定运行,准确执行控制任务
1.3 《工业互联网边缘计算 边缘节点模型与要求 边缘云》对边缘计算节点中的边缘云的模型与要求进行了规范,使得边缘云能够高效地存储和处理数据,为边缘计算提供强大的支撑
1.4 《工业互联网边缘计算 边缘网关技术要求及测试方法》规定了工业互联网边缘网关的技术要求及测试方法等内容,为边缘网关的研发、生产和检测提供了明确的标准
1.5 《T/JSPAA 006 - 2024工业互联网边缘计算网关技术要求》作为中国团体标准,规定了工业互联网边缘计算网关参考架构,以及硬件功能、软件基本功能等方面的要求,从多个维度保障了边缘计算网关的质量和性能
国内与国际标准对比
1.6 在国际上电磁兼容性测试标准主要有IEC标准、ISO标准、EN标准、FCC标准、CISPR标准、MIL - STD标准等。其中IEC标准是关于电磁兼容性的国际标准,为全球电磁兼容测试提供了通用的准则
1.7 不同地区的标准在具体要求和侧重点上存在差异,例如EN标准是欧洲标准,对设备的电磁兼容性要求较为严格,在辐射放射测试、传导抗扰测试等方面都有详细的限值规定;而FCC标准是美国标准,更注重设备对美国本土电磁环境的适应性
1.8 了解国际标准差异,有助于边缘计算网关在全球市场的推广和应用,满足不同地区客户的需求,确保产品在国际市场上的竞争力
二 EMC电磁兼容标准解读
2.1 传导放射测试(CE)传导放射测试主要测试设备通过电源线或信号线等传导途径向外部发射的电磁干扰信号。限值根据不同频率范围有具体规定,如EN55011等标准中有详细要求。在低频段,限值相对宽松,但随着频率升高,限值逐渐严格,以确保设备不会对周围的电子设备产生过大的干扰
2.2 辐射放射测试(RE)辐射放射测试检测设备向周围空间辐射的电磁干扰信号强度。不同频段有相应的辐射限值标准,如EN55011对不同产品在不同距离下的辐射发射有明确限制。对于靠近人体使用的设备,其辐射限值要求更为严格,以保障人体健康
三 内部核心模块
处理器模块 是边缘计算网关的核心模块之一,它完成数据处理、协议解析、边缘计算等核心任务。CPU、GPU、ARM处理器,具有强大的计算能力,能够快速处理大量的数据,满足边缘计算对实时性和高效性的要求,为整个网关的稳定运行提供了有力支持
存储模块 包括内存和外存,用于暂存和长期存储数据、程序等。如DDR3内存能够快速读写数据,为处理器提供高效的数据支持,保证系统的运行速度;eMMC闪存则适合长期存储数据和程序,即使在断电情况下,数据也不会丢失,确保了网关运行的稳定性和数据的安全性
通信模块实现与外部设备或网络的连接,它包含有线以太网模块、4G/5G通信模块、Wi - Fi模块、蓝牙模块等。有线以太网模块提供稳定高速的网络连接,适用于对数据传输速度和稳定性要求较高的场景;4G/5G通信模块则使网关能够实现远程无线通信,方便在移动场景或偏远地区使用;Wi - Fi模块和蓝牙模块则用于短距离无线通信,便于连接周边的智能设备,实现数据的交互和共享
电源管理模块负责将输入电源转换为各模块所需的稳定电压,并进行电源分配和管理。有的还具备电源反接保护等功能,确保在电源接入错误时,不会对网关设备造成损坏,保障了设备的安全稳定运行,延长了设备的使用寿命
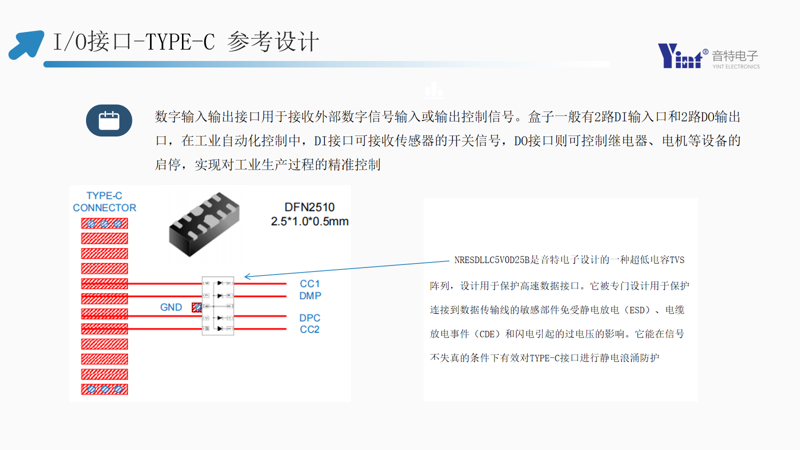
传感器接口模块用于连接各类传感器,实现数据采集。如GPIO、ADC、IIC、UART、PWM、SPI等接口,每种接口都有其独特的功能和适用场景。GPIO接口可用于连接简单的数字传感器,实现基本的信号输入输出;ADC接口则用于将模拟信号转换为数字信号,便于处理器处理,适用于连接温度、压力等模拟传感器
安全模块保障设备和数据的安全,它包括加密芯片、安全认证模块等。加密芯片对数据进行加密处理,防止数据在传输和存储过程中被窃取或篡改;安全认证模块则对访问设备的用户进行身份认证,确保只有授权用户才能访问设备和数据,保护了设备和数据的安全性
四 I/O接口类型及应用

五 供电电压
常见的供电电压有DC 12V、DC 24V、DC 48V等。通常采用DC12V电源适配器供电,这种电压适用于一些小型设备或对功耗要求较低的场景;宽范围支持DC输入电压12/24/48 VDC(9.6 ~ 60 VDC)且有两路冗余电源输入,宽电压范围和冗余电源设计使其能适应更复杂的工作环境,保障设备在不同供电条件下的稳定运行,即使一路电源出现故障,另一路电源仍可保证设备正常工作
六 EMC参考电路
整流单元:将工频交流电源转换为直流电源,通常由二极管或晶闸管组成
滤波单元:用于平滑整流后的直流电压,减少电压纹波,一般由电容、电感等元件构成
逆变单元:把直流功率变换为所需频率的交流功率,以驱动电机,主要由 IGBT 等功率开关器件组成
运算电路:对外部输入的速度、转矩等指令与检测电路反馈的电流、电压信号进行比较运算,确定逆变器的输出电压和频率
电压、电流检测电路:与主回路电位隔离,实时检测主电路的电压、电流等参数,为控制和保护提供依据
驱动电路:将控制信号放大,驱动主电路中的功率器件,使其按照控制要求导通和关断
速度检测电路:以安装在电机轴上的速度检测器的信号为速度反馈,送入运算回路实现速度闭环控制
保护电路:监测主电路的电压、电流等参数,当出现过载、过压、过流、过热等异常情况时,及时采取保护措施,防止设备损坏
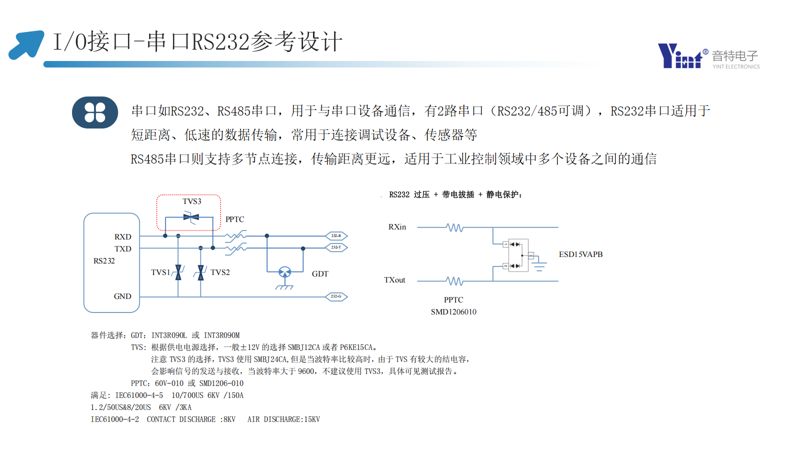
通信接口模块:实现变频器与上位机、PLC 或其他设备之间的通信,常见的接口有 RS485、RS232、Ethernet、CAN 总线等,可用于参数设置、状态监控和远程控制等
参数设置与存储模块:用于存储和设置变频器的各种参数,如电机参数、运行参数、保护参数等,用户可通过操作面板或通信接口进行参数修改和调整
问题表现:变频器产生的高频干扰信号通过电源线传导,影响同一电源网络中的其他设备,导致设备工作异常、出现误动作等
解决方法:在变频器输入端安装电源滤波器,抑制高频干扰信号的传导;使用隔离变压器,将变频器电源与其他设备电源隔离;合理布线,避免电源线与信号线平行敷设,减少电磁耦合
问题表现:变频器的功率器件在开关过程中会产生电磁辐射,干扰周围的电子设备,如影响附近的传感器、PLC 等设备的正常工作
解决方法:将变频器安装在金属屏蔽柜内,并确保屏蔽柜良好接地;对变频器的信号线缆采用屏蔽线,并将屏蔽层两端接地;合理布置设备位置,增大变频器与其他敏感设备的距离
问题表现:接地不良会导致变频器的电位不稳定,产生接地环路电流,引入干扰信号,同时也会影响设备的安全性能,可能使电机运行异常、变频器出现故障等
解决方法:确保变频器有独立、可靠的接地系统,接地电阻符合要求;采用单点接地或多点接地方式,根据实际情况优化接地布局;避免不同类型的接地相互干扰,如信号地、电源地和保护地要分开
问题表现:干扰信号通过变频器的输入输出信号线传导,导致信号失真、控制不准确,使电机运行不稳定或出现误动作
解决方法:对信号线进行合理布线,与电源线保持一定距离,避免平行走线;在信号线上安装共模电感、磁珠等滤波元件,抑制共模和差模干扰;对信号接口进行隔离和滤波处理,如采用光电隔离器等
问题表现:静电可能通过变频器的输入输出接口、外壳等部位放电,损坏内部电子元件,导致变频器故障,如控制芯片损坏、功率器件失效等
解决方法:在输入输出接口电路中增加静电保护元件,如静电放电二极管等;对变频器的外壳进行防静电处理,采用防静电材料;操作人员在接触设备时,应佩戴防静电手环等防护用品,避免人体静电对设备造成损害
问题表现:电源中的纹波、尖峰、浪涌等干扰信号可能导致控制器工作异常,出现脉冲信号输出不稳定、电机运行不平稳等现象
解决方法:安装电源滤波器,滤除电源中的高频干扰信号;使用隔离变压器,将步进控制体系的电源与其他设备的电源隔离;配备浪涌保护器,防止雷击等瞬间高压对设备造成损坏
问题表现:周围的强电磁场辐射可能影响脉冲信号的传输和位置反馈信号的准确性,导致电机运行出现偏差、控制系统误动作等
解决方法:将控制器和驱动器安装在金属屏蔽柜内;对脉冲信号线和位置反馈信号线采用双绞屏蔽线,并确保屏蔽层良好接地;合理布置设备位置,避免将步进控制体系暴露在强辐射源附近
问题表现:干扰信号通过电源线、信号线等传导到控制体系内部,引起系统故障,如控制器误判指令、驱动器输出异常等
解决方法:对电源线和信号线进行合理布线,避免强电和弱电线路并行;在电源线和信号线上安装共模电感、差模电感等元件,抑制传导干扰;对信号接口进行隔离和滤波处理
问题表现:接地不良可能导致设备的电位不稳定,产生接地环路电流,引入干扰信号,还可能影响设备的安全性能,导致电机运行异常、控制器死机等问题
解决方法:确保步进控制体系有独立、可靠的接地系统,接地电阻应符合要求;将信号地、电源地、保护地分开,避免不同类型的接地相互干扰;采用多点接地或单点接地的方式,根据实际情况优化接地布局
问题表现:静电可能通过控制器、驱动器的输入输出接口、外壳等部位放电,损坏内部电子元件,导致设备故障,如脉冲信号发生器损坏、位置传感器失效等
解决方法:在输入输出接口电路中增加静电保护元件,如静电放电二极管等;对设备的外壳进行防静电处理,采用防静电材料;操作人员在接触设备时,应佩戴防静电手环等防护用品
芯片交换器:核心部件,负责数据包的转发与处理,支持多种网络协议和数据通信方式,决定网络的数据吞吐能力和效率
处理器(CPU):运算和控制核心,承担路由表查找、数据包转发等计算任务,多核处理器可同时处理多任务,提高数据处理速度和效率
端口:常见有 RJ45 端口、光口、SFP 端口、SFP + 端口、QSFP + 端口、USB 端口、Console 端口等,用于连接不同设备,实现数据交换
背板:提供业务接口和数据转发联系的通道,背板带宽是评估交换机性能的重要指标。
内存(RAM):为 CPU 运算提供动态存储空间,存储正在运行的程序和当前数据,具有缓存功能,可提高整体性能
闪存(Flash):用于永久性保存配置文件、系统软件和其他重要数据,确保交换机断电后数据不丢失
管理与监控模块:用于远程管理和监控交换机的运行状态,可进行配置管理、性能监测、故障诊断等操作,确保交换机稳定运行
附加功能模块:如支持 VLAN(虚拟局域网)、QoS(服务质量)等功能,可根据具体需求为交换机增加相应的额外功能,提升其性能和功能多样性
问题表现:工业交换机产生的高频干扰信号通过电源线传导,对同一电源网络中的其他设备造成干扰,使其工作异常
解决方法:在电源输入端安装电源滤波器,抑制高频干扰信号;采用隔离变压器,将交换机电源与其他设备电源隔离;合理布线,避免电源线与信号线平行敷设
问题表现:交换机内部的电子元件和电路在工作时会产生电磁辐射,干扰周围的电子设备,影响其正常工作
解决方法:将交换机安装在金属屏蔽柜内,并确保屏蔽柜良好接地;对信号线缆采用屏蔽线,并将屏蔽层两端接地;合理布置设备位置,增大与其他敏感设备的距离
问题表现:接地不良会导致交换机电位不稳定,产生接地环路电流,引入干扰信号,影响设备的正常运行和安全性。
解决方法:确保交换机有独立、可靠的接地系统,接地电阻符合要求;采用单点接地或多点接地方式,根据实际情况优化接地布局;避免不同类型的接地相互干扰
问题表现:干扰信号通过交换机的输入输出信号线传导,导致信号失真、数据传输错误,影响网络通信质量
解决方法:对信号线进行合理布线,与电源线保持一定距离,避免平行走线;在信号线上安装共模电感、磁珠等滤波元件,抑制共模和差模干扰;对信号接口进行隔离和滤波处理
问题表现:静电可能通过交换机的输入输出接口、外壳等部位放电,损坏内部电子元件,导致交换机故障
解决方法:在输入输出接口电路中增加静电保护元件,如静电放电二极管等;对交换机的外壳进行防静电处理,采用防静电材料;操作人员在接触设备时,应佩戴防静电手环等防护用品
电源模块:为伺服驱动器提供稳定的电能,确保其正常运行
控制电路:接收、分析和处理来自外部的控制信号,根据预设算法输出合适的电流信号给电机驱动器,实现对电动机的精确控制。通常采用专用 DSP 或 FPGA 芯片,负责复杂算法计算和指令处理
功率模块:一般由 IGBT 或 MOS 管构成,将高电压转化为适合电机驱动的电压,并将电流输出到电机中,实现电能的高效转换,驱动电机运转
电流控制器:根据需要调整电流的大小和方向,以实现对电机的精确控制,保证电机输出所需的力和速度
问题表现:伺服驱动器产生的高频干扰信号通过电源线传导,影响同一电源网络中的其他设备,导致设备工作异常、出现误动作等
解决方法:在伺服驱动器输入端安装电源滤波器,抑制高频干扰信号的传导;使用隔离变压器,将伺服驱动器电源与其他设备电源隔离;合理布线,避免电源线与信号线平行敷设,减少电磁耦合
问题表现:伺服驱动器的功率器件在开关过程中会产生电磁辐射,干扰周围的电子设备,如影响附近的传感器、PLC 等设备的正常工作
解决方法:将伺服驱动器安装在金属屏蔽柜内,并确保屏蔽柜良好接地;对伺服驱动器的信号线缆采用屏蔽线,并将屏蔽层两端接地;合理布置设备位置,增大伺服驱动器与其他敏感设备的距离
问题表现:接地不良会导致伺服驱动器的电位不稳定,产生接地环路电流,引入干扰信号,同时也会影响设备的安全性能,可能使电机运行异常、伺服驱动器出现故障
解决方法:确保伺服驱动器有独立、可靠的接地系统,接地电阻符合要求;采用单点接地或多点接地方式,根据实际情况优化接地布局;避免不同类型的接地相互干扰,如信号地、电源地和保护地要分开
问题表现:干扰信号通过伺服驱动器的输入输出信号线传导,导致信号失真、控制不准确,使电机运行不稳定或出现误动作
解决方法:对信号线进行合理布线,与电源线保持一定距离,避免平行走线;在信号线上安装共模电感、磁珠等滤波元件,抑制共模和差模干扰;对信号接口进行隔离和滤波处理,如采用光电隔离器等
问题表现:静电可能通过伺服驱动器的输入输出接口、外壳等部位放电,损坏内部电子元件,导致伺服驱动器故障,如控制芯片损坏、功率器件失效等
解决方法:在输入输出接口电路中增加静电保护元件,如静电放电二极管等;对伺服驱动器的外壳进行防静电处理,采用防静电材料;操作人员在接触设备时,应佩戴防静电手环等防护用品,避免人体静电对设备造成损害
问题表现:电源中的纹波、尖峰、浪涌等干扰信号可能导致 PLC 工作异常,如程序运行错误、元件损坏等
解决方法:安装电源滤波器,滤除电源中的高频干扰信号;使用隔离变压器,将 PLC 的电源与其他设备的电源隔离,减少电源之间的相互干扰;配备浪涌保护器,防止雷击等瞬间高压对 PLC 造成损坏
问题表现:周围的强电磁场辐射可能影响 PLC 的正常工作,导致信号传输错误、程序运行不稳定等
解决方法:将 PLC 安装在金属屏蔽柜内,屏蔽外界的电磁辐射;对 PLC 的信号线采用双绞屏蔽线,并确保屏蔽层良好接地;合理布置 PLC 与其他设备的位置,避免将 PLC 暴露在强辐射源附近
问题表现:干扰信号通过电源线、信号线等传导到 PLC 内部,引起系统故障
解决方法:对电源线和信号线进行合理布线,避免强电和弱电线路并行,减少传导耦合;在电源线和信号线上安装共模电感、差模电感等元件,抑制传导干扰
问题表现:接地不良可能导致 PLC 的电位不稳定,产生接地环路电流,引入干扰信号,还可能影响设备的安全性能
解决方法:确保 PLC 有独立、可靠的接地系统,接地电阻应符合要求(一般≤4Ω);将信号地、电源地、保护地分开,避免不同类型的接地相互干扰;采用多点接地或单点接地的方式,根据实际情况优化接地布局
问题表现:静电可能通过 PLC 的输入输出接口、外壳等部位放电,损坏内部电子元件,导致设备故障
解决方法:在 PLC 的输入输出接口电路中增加静电保护元件,如静电放电二极管等;对 PLC 的外壳进行防静电处理,采用防静电材料;操作人员在接触 PLC 设备时,应佩戴防静电手环等防护用品,防止人体静电对设备造成损害
相机:常见的有 CCD 相机和 CMOS 相机,将光信号转换为电信号或数字信号,根据应用场景选择不同分辨率、帧率、灵敏度的相机
镜头:根据焦距、光圈、景深等参数选择合适的镜头,确保拍摄到清晰、完整的图像,常见的有定焦镜头、变焦镜头等
光源:为拍摄提供充足的光线,包括高频荧光灯、LED 灯等,不同的光源颜色、强度和角度会影响图像质量
图像采集卡:将相机输出的信号转换为计算机能够处理的数字信号,同时控制相机的参数,如触发、曝光时间等
处理器:通常是计算机或专用的图像处理芯片,对采集到的图像数据进行处理、分析和识别,完成特征提取、目标定位等任务
机器人控制单元:根据视觉系统的处理结果,控制工业机器人的动作,实现对目标的抓取、装配等操作
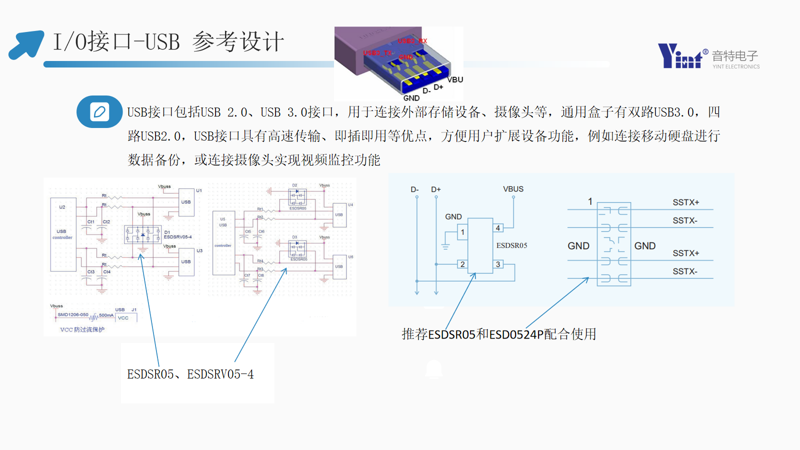
通信接口:实现视觉设备与工业机器人、上位机或其他设备之间的数据传输和通信,常见的接口有以太网、USB、RS-232 等
图像处理软件:对采集到的图像进行预处理、滤波、增强、分割等操作,提高图像质量,为后续的分析和识别提供基础
模式识别与深度学习算法:用于目标识别、分类、定位等任务,如基于模板匹配、特征匹配的传统模式识别算法,以及基于卷积神经网络等的深度学习算法
问题表现:设备内部的电子元件和电路工作时产生电磁辐射,干扰周围电子设备
解决方法:将设备安装在金属屏蔽柜内并良好接地;对信号线缆采用屏蔽线并将屏蔽层两端接地;合理布置设备位置,增大与其他敏感设备的距离
问题表现:接地不良导致电位不稳定,产生接地环路电流,引入干扰信号
解决方法:确保设备有独立、可靠的接地系统,接地电阻符合要求;采用单点接地或多点接地方式,优化接地布局
问题表现:干扰信号通过输入输出信号线传导,导致信号失真、数据传输错误
解决方法:对信号线合理布线,与电源线保持距离,避免平行走线;在信号线上安装共模电感、磁珠等滤波元件
问题表现:静电通过设备的输入输出接口、外壳等部位放电,损坏内部电子元件
解决方法:在输入输出接口电路中增加静电保护元件;对设备的外壳进行防静电处理;操作人员佩戴防静电手环等防护用品












 沪公网安备31011702889749号
沪公网安备31011702889749号 Global
Global