一、机器人手臂控制器行业标准剖析
GB/T 39004—2020《工业机器人电磁兼容设计规范》
GB/T 37283-2019 服务机器人 电磁兼容 通用标准 抗扰度要求和限值
GB/T 39785-2021 服务机器人 机械安全评估与测试方法
GB/T 40014-2021 双臂工业机器人 性能及其试验方法
GB/T 40013-2021 服务机器人 电气安全要求及测试方法
GBZ 41046-2021 上肢康复训练机器人 要求和试验方法
TGDCKCJH 013-2020 工业机器人伺服系统可靠性通用要求
TGDCKCJH 014-2020 工业机器人伺服系统可靠性仿真试验规范
TGDCKCJH 015-2020 工业机器人伺服系统可靠性强化试验方法
TGQDA 00005-2021 机器人控制器加速试验与可靠性指标验证方法
TSSITS 301-2020 工业应用移动机器人 设计通则
1.1 同样在T/ZXCH 0014- 2023标准中,规定了详细的试验方法和检验规则。通过这些标准的试验方法,可以准确测试机器人手臂控制器的各项性能,判断其是否符合技术要求;检验规则则明确了产品的合格判定准则,从原材料检验到成品检验,每一个环节都有严格的规范,保证进入市场的机器人手臂控制器质量可靠,为用户提供稳定、高效的使用体验
1.2 GB/T 37283-2019《服务机器人 电磁兼容 通用标准 抗扰度要求和限值》
B 级:服务机器人正常工作时,其性能受到一定电磁干扰影响,但仍能满足基本功能要求
|
试验名称 |
中国标准 |
国际标准 |
|
静电放电抗扰度试验 |
GB/T 17626.2 |
IEC61000-4-2 |
|
射频电磁场辐射抗扰度试验 |
GB/T 17626.3 |
IEC61000-4-3 |
|
电快速瞬变脉冲群抗扰度试验 |
GB/T 17626.4 |
IEC61000-4-4 |
|
浪涌(冲击)抗扰度试验 |
GB/T 17626.5 |
IEC61000-4-5 |
|
射频场感应的传导骚扰抗扰度试验 |
GB/T 17626.6 |
IEC61000-4-6 |
|
工频磁场抗扰度试验 |
GB/T 17626.8 |
IEC61000-4-8 |
|
电压暂降、短时中断和电压变化的抗扰度试验 |
GB/T 17626.11 |
IEC61000-4-11 |
国际标准化组织(ISO)标准
ISO 10218-1:2011 :《机器人与机器人装置 工业机器人的安全要求 第 1 部分:机器人》
ISO 10218-2:2011:《机器人与机器人装置 工业机器人的安全要求 第 2 部分:机器人系统与集成》
ISO/TS 15066:2016:《机器人与机器人装置 协作机器人》
美国标准
ANSI/RIA R15.06-2012:《工业机器人和机器人系统 安全要求》
RIA TR R15.606-2016:美国协作机器人安全标准
欧盟标准
EN ISO 10218-1:2011和EN ISO 10218-2:2011
EN 60204-1:《机械安全 机械电气设备 》
德国
VDI 2057 Blatt 2-2002和VDI 2057 Blatt 2-2012:《人体暴露于机械振动 手臂振动》
DIN EN ISO 13849-1:2016:《机械安全 控制系统的安全相关部件
日本机器人协会(JARA),ISO 13482 是关于护理机器人安全性的国际标准
二、机器人手臂控制器EMC电磁兼容
2.1 GB/T 39004—2020《工业机器人电磁兼容设计规范》,该标准于中国机械工业联合会规定了工业机器人的示教器、控制柜、机器人本体、印制电路板(PCB)的电磁兼容(EMC)设计要求 2.2 EMC证实方法: 电磁兼容性测试方法:规定了工业机器人电磁兼容性的测试方法和程序,包括测试环境、测试设备、测试项目和测试步骤等 设计过程记录:要求对工业机器人电磁兼容设计的过程进行记录,包括设计文档、测试报告、整改记录等,以便于追溯和验证设计的有效性
2.3 工业机器人在运行过程中会产生大量电磁干扰,同时自身也对外界电磁干扰敏感。如果电磁兼容性处理不当,不仅会影响机器人系统的稳定性和精确性,导致动作偏差、数据传输错误等问题,还可能干扰周围设备的正常工作
2.4 以汽车制造自动化生产线为例,控制机器人手臂的控制系统对电磁干扰非常敏感,一旦受到干扰,机器人手臂可能会出现动作偏差,影响汽车零部件的安装质量。因此,对机器人手臂控制器进行EMC设计与测试,是确保其在各种电磁环境下可靠运行的关键,对于保障工业生产的顺利进行具有重要意义
2.5 EMC抗干扰设计方法
屏蔽 是常见的抗干扰措施,通过使用金属屏蔽材料将设备或电路包围起来,能够有效阻止外部电磁干扰进入,同时防止内部电磁干扰泄漏出去;例如,在工业电缆中,通常会使用金属屏蔽层来保护电缆内部的信号传输不受外界干扰
接地 可以将设备上的电磁干扰电流引入大地,从而降低设备的电磁干扰水平;在工业自动化系统中,会根据设备特点和电磁环境选择单点接地、多点接地等不同的接地方式
合理布局在工业自动化设备的设计和安装过程中,能减少电磁干扰的产生和传播。比如将强电设备和弱电设备分开布置,避免强电设备对弱电设备产生干扰;合理规划电缆的走向,避免电缆之间的相互干扰
滤波 去除电路中的高频干扰信号,在电源电路中,常使用电源滤波器来抑制电源线上的电磁干扰,保证设备获得稳定、纯净的电源
三、机器人手臂控制器常见问题与行业痛点洞察
技术瓶颈A 机器人手臂控制器的核心部件和关键技术仍存在短缺问题,高性能伺服电机、减速器、控制器等技术壁垒高,突破难度大,限制了机器人整体性能的提升
技术瓶颈B 智能化、感知能力和适应性仍有待提高。在复杂多变的工作环境中,机器人手臂控制器难以快速、准确地感知环境变化并做出相应调整,无法满足日益增长的多样化应用需求
市场困境 目前机器人行业市场竞争激烈,同质化现象严重,许多企业为了争夺市场份额,大打价格战,导致整个行业利润空间被大幅压缩,企业缺乏足够的资金投入研发和创新,不利于行业的健康发展;机器人企业在市场开拓方面面临诸多困难,一方面,对市场需求的了解不够深入,产品与市场实际需求存在一定偏差;另一方面,缺乏有效的营销策略,难以打开新的市场和客户群体,限制了企业的发展规模和速度
四、为机器人手臂控制器赋能
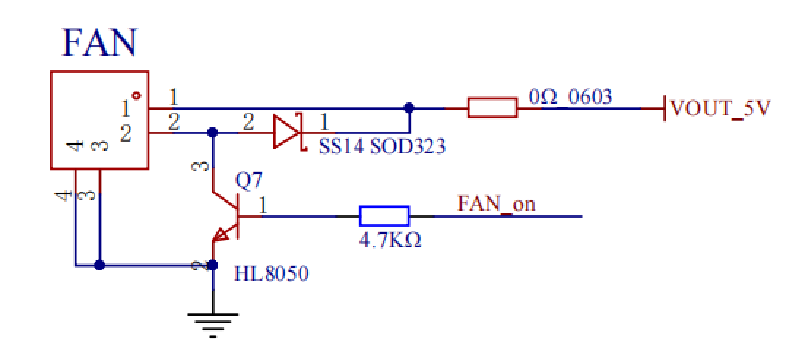
风扇模块解决方案 , 针对机器人手臂控制器的风扇模块,采用高效散热设计理念,选用高性能的风扇组件,确保在机器人手臂控制器运行过程中能够快速、有效地散发热量, 通过优化风扇的转速控制算法,实现根据控制器的温度实时调节风扇转速,既能保证良好的散热效果,又能降低风扇运行产生的噪音和能耗,提高系统的稳定性和可靠性;音特电子能够提供SS14 ,HL8050
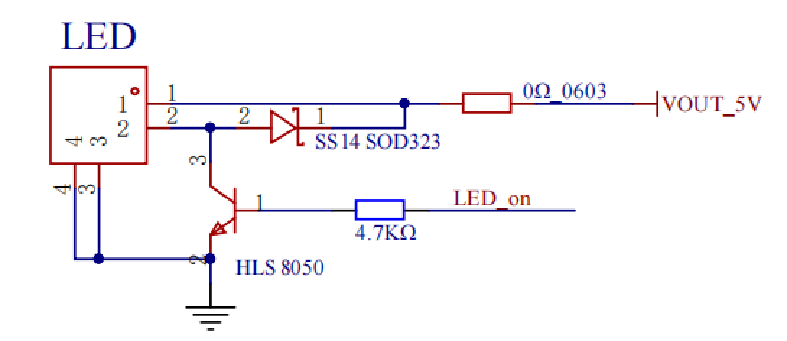
在LED显示模块方面,提供高亮度、高对比度的LED显示屏,能够清晰地展示机器人手臂控制器的各种运行状态信息,如工作模式、故障报警等,确保LED显示屏的显示效果稳定,延长显示屏的使用寿命,音特电子能够提供 SS14 、HL8050
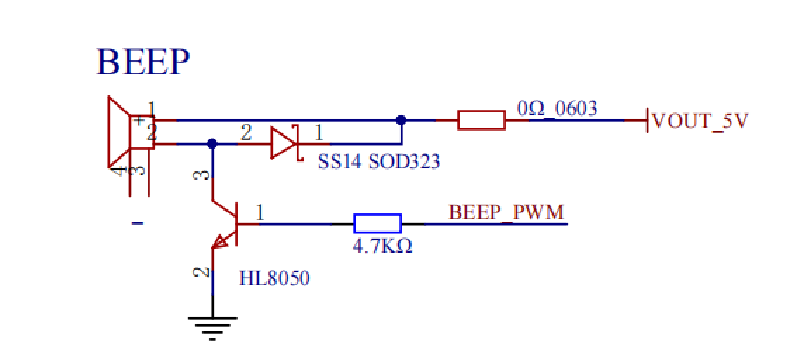
对于BEEP蜂鸣器模块,使其在机器人手臂控制器出现异常情况时,能够及时、准确地发出警报声,引起操作人员的注意,为操作人员提供明确的故障提示,便于及时采取相应的处理措施;音特电子能够提供SS14 ,HL8050
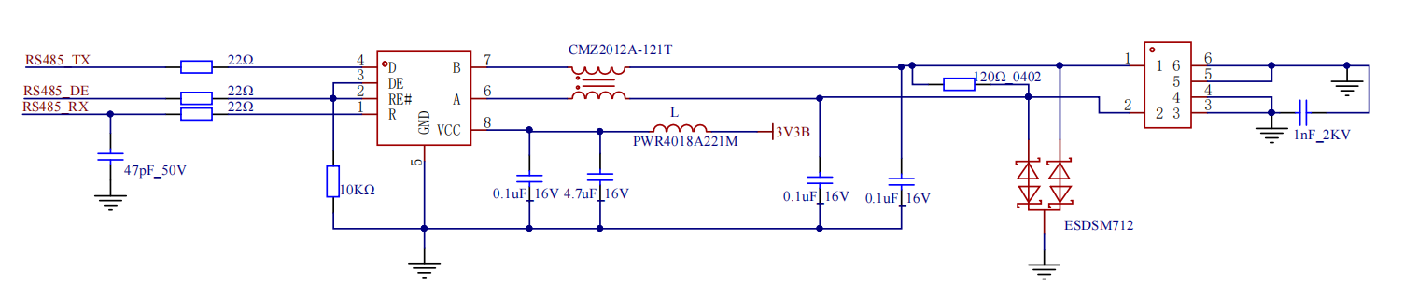
RS485通讯模块具备高抗干扰能力,采用先进的差分信号传输技术,有效减少信号传输过程中的干扰,确保数据传输的准确性和稳定性
CMZ2012-121T 共模电感,提高EMI性能
PWR4018A221M 提高电源的品质
ESDSM712 静电保护,确保安装拔插过程的静电干扰
以太网通讯模块提供高速的网络连接,采用先进的网络芯片和优化的网络驱动程序,确保机器人手臂控制器能够快速、稳定地接入以太网,具备网络自适应功能,可自动识别网络环境并调整通信参数,实现与不同网络设备的无缝对接。同时,支持多种网络协议,满足不同应用场景下的数据传输需求很重要
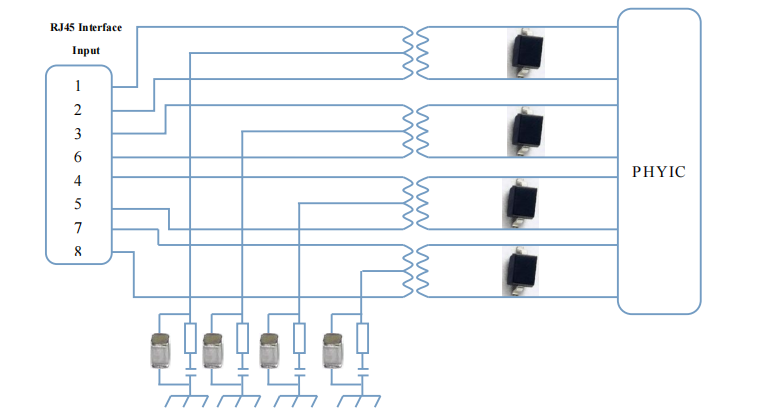
GDT/SMD1812-091
或者 GDT/3R090-8L
区别在于第二级防护,由于千兆网的传输速率更快,对寄生电容值得要求更高,一般推荐 2pF 以下,差分电
压百兆千兆也有不同,故第二级保护使用的器件也和百兆网不同。音特推荐使用电容只有 0.8pF 的
ESDLC3V3D3B,封装为 SOD323,或者使用音特电子专为千兆网络定制的 ESDSLVU2.8-4H,封装为 SOP-8,使用方
法和百兆网上的 ESDSLVU2.8-4 一样
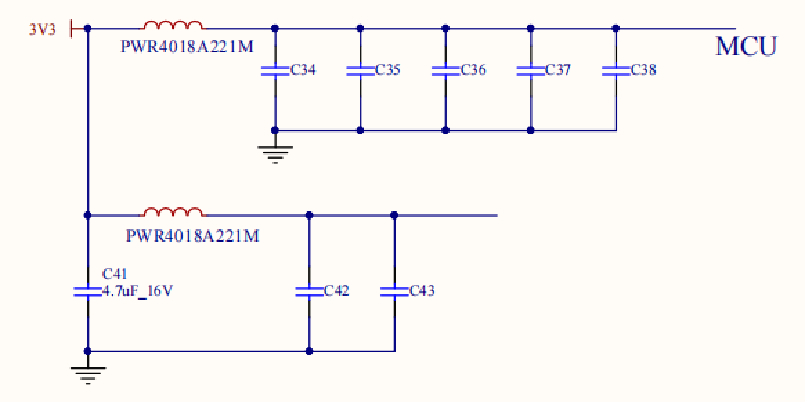
在MCU处理器模块方面,除了选用高性能、低功耗的MCU芯片,具备强大的数据处理能力和丰富的外设资源,能够快速响应各种控制指令,实现对机器人手臂的精确控制,对于MCU的电源供电电源也很关键
音特电子提供 PWR4018A221M 滤波电感
致力成为全球 EMC电磁兼容技术方案及器件供应商 www.yint.com.cn

问题表现:电源中的纹波、尖峰、浪涌等干扰信号可能导致 PLC 工作异常,如程序运行错误、元件损坏等
解决方法:安装电源滤波器,滤除电源中的高频干扰信号;使用隔离变压器,将 PLC 的电源与其他设备的电源隔离,减少电源之间的相互干扰;配备浪涌保护器,防止雷击等瞬间高压对 PLC 造成损坏
问题表现:周围的强电磁场辐射可能影响 PLC 的正常工作,导致信号传输错误、程序运行不稳定等
解决方法:将 PLC 安装在金属屏蔽柜内,屏蔽外界的电磁辐射;对 PLC 的信号线采用双绞屏蔽线,并确保屏蔽层良好接地;合理布置 PLC 与其他设备的位置,避免将 PLC 暴露在强辐射源附近
问题表现:干扰信号通过电源线、信号线等传导到 PLC 内部,引起系统故障
解决方法:对电源线和信号线进行合理布线,避免强电和弱电线路并行,减少传导耦合;在电源线和信号线上安装共模电感、差模电感等元件,抑制传导干扰
问题表现:接地不良可能导致 PLC 的电位不稳定,产生接地环路电流,引入干扰信号,还可能影响设备的安全性能
解决方法:确保 PLC 有独立、可靠的接地系统,接地电阻应符合要求(一般≤4Ω);将信号地、电源地、保护地分开,避免不同类型的接地相互干扰;采用多点接地或单点接地的方式,根据实际情况优化接地布局
问题表现:静电可能通过 PLC 的输入输出接口、外壳等部位放电,损坏内部电子元件,导致设备故障
解决方法:在 PLC 的输入输出接口电路中增加静电保护元件,如静电放电二极管等;对 PLC 的外壳进行防静电处理,采用防静电材料;操作人员在接触 PLC 设备时,应佩戴防静电手环等防护用品,防止人体静电对设备造成损害












 沪公网安备31011702889749号
沪公网安备31011702889749号 Global
Global