问题表现:电源中的纹波、尖峰、浪涌等干扰信号可能导致控制器工作异常,出现脉冲信号输出不稳定、电机运行不平稳等现象
解决方法:安装电源滤波器,滤除电源中的高频干扰信号;使用隔离变压器,将步进控制体系的电源与其他设备的电源隔离;配备浪涌保护器,防止雷击等瞬间高压对设备造成损坏
问题表现:周围的强电磁场辐射可能影响脉冲信号的传输和位置反馈信号的准确性,导致电机运行出现偏差、控制系统误动作等
解决方法:将控制器和驱动器安装在金属屏蔽柜内;对脉冲信号线和位置反馈信号线采用双绞屏蔽线,并确保屏蔽层良好接地;合理布置设备位置,避免将步进控制体系暴露在强辐射源附近
问题表现:干扰信号通过电源线、信号线等传导到控制体系内部,引起系统故障,如控制器误判指令、驱动器输出异常等
解决方法:对电源线和信号线进行合理布线,避免强电和弱电线路并行;在电源线和信号线上安装共模电感、差模电感等元件,抑制传导干扰;对信号接口进行隔离和滤波处理
问题表现:接地不良可能导致设备的电位不稳定,产生接地环路电流,引入干扰信号,还可能影响设备的安全性能,导致电机运行异常、控制器死机等问题
解决方法:确保步进控制体系有独立、可靠的接地系统,接地电阻应符合要求;将信号地、电源地、保护地分开,避免不同类型的接地相互干扰;采用多点接地或单点接地的方式,根据实际情况优化接地布局
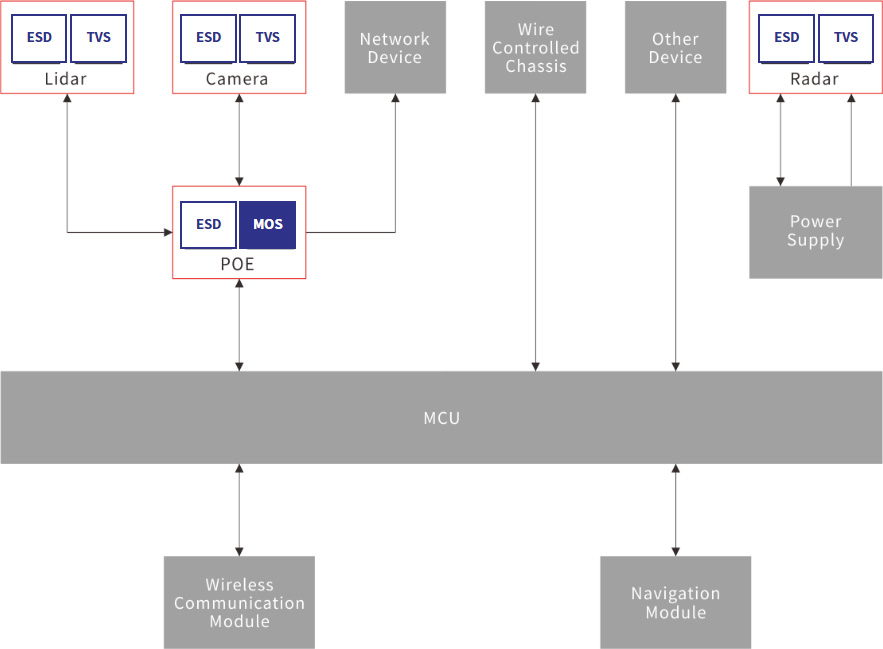
问题表现:静电可能通过控制器、驱动器的输入输出接口、外壳等部位放电,损坏内部电子元件,导致设备故障,如脉冲信号发生器损坏、位置传感器失效等
解决方法:在输入输出接口电路中增加静电保护元件,如静电放电二极管等;对设备的外壳进行防静电处理,采用防静电材料;操作人员在接触设备时,应佩戴防静电手环等防护用品












 沪公网安备31011702889749号
沪公网安备31011702889749号 Global
Global